概要
リアルタイムシミュレータRTSim-IIIはMathWorks社のMATLAB/Simulinkで作成したシミュレーションモデルをステップサイズに基づいた実時間(リアルタイム)で動作させることができます。
またモデルへの外部入力(A/D、DI等)やモデルからの外部出力(D/A、DO等)も実時間処理が可能です。
コントローラとしてのラピッドプロトタイプや制御対象としてのHILSとして使用することが可能です。
特徴
①MATLAB®/Simulink®(*3)モデルでの実装
MATLAB/Simulinkで作成したシミュレーションモデルを、Simlink Corderを介してプログラミングレスでリアルタイムシミュレータに実装可能試作コントローラ、コントローラの試験環境を短時間で構築、仕様変更可能
②スペック
最高約50μs周期でモデルを高速に実行(動作速度はモデルの規模に依存します)
③再現性
意図的な故障など、実機では難しい試験をモデルで安全に再現可能
④モータ制御アプリケーションに対応
3相PWM発生器、レゾルバ変換機、エンコーダインタフェース等、モータ制御に必要なユニットを用意
【*1】Lapid Prototype
【*2】Hardware in the Loop Simulation
【*3】MATLAB、Simulink、Simulink CorderはMathWorks社の登録商標です。
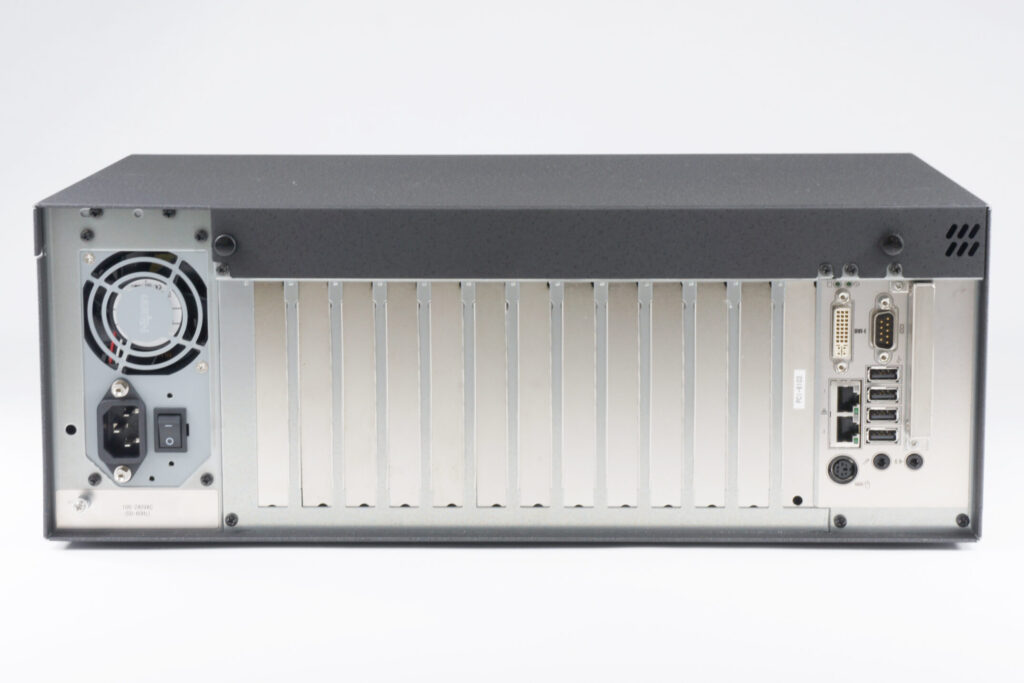
仕様
モデル実装方法:Simulink Corder
入出力ボードスロット:10スロット
ホストPCとの接続:イーサネット
MATLAB対応バージョン:R2015a~R2018a
ホストPCのOS:Windows 10
サイズ:W:431×D:370×H:149[mm]
電源:AC100V 250W