名城大学 理工学部 交通機械工学科 前川先生の研究室にて、MATLAB/SimulinkベースのRCPコントローラ 「DT-0008 高速コントローラ」を研究にご活用頂きましたので、インタビューをさせて頂きました。
ラピッドコントロールプロトタイピング(RCP)を採用頂いた研究内容
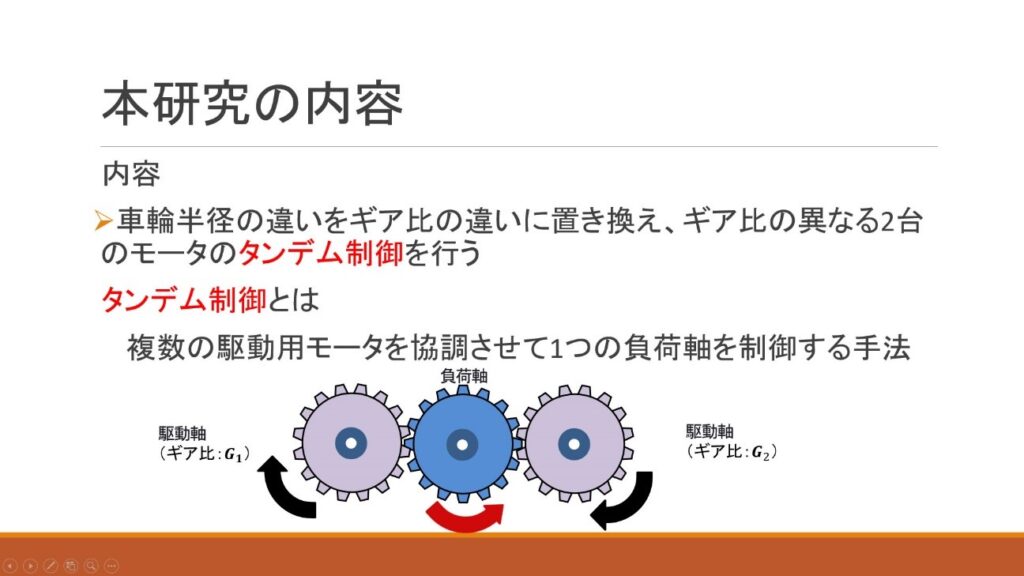
アカデミック向けRCP DT-0008を先生のタンデム制御のご研究にご活用頂いたと伺いました。タンデム制御とはどのようなものでしょうか?
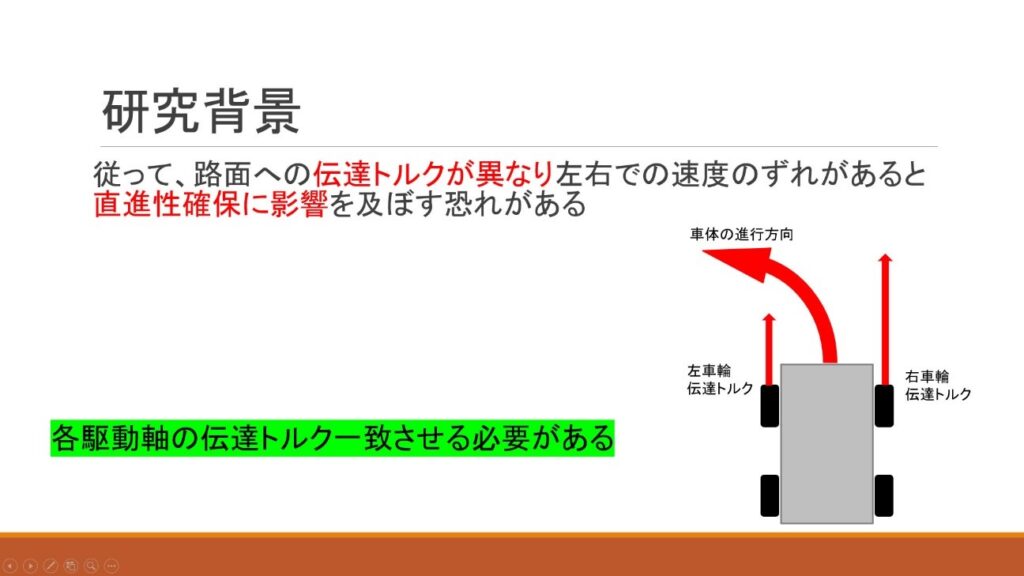
[前川先生] 資料は自動車の例ですが、工作機械などにも応用できると思われます。
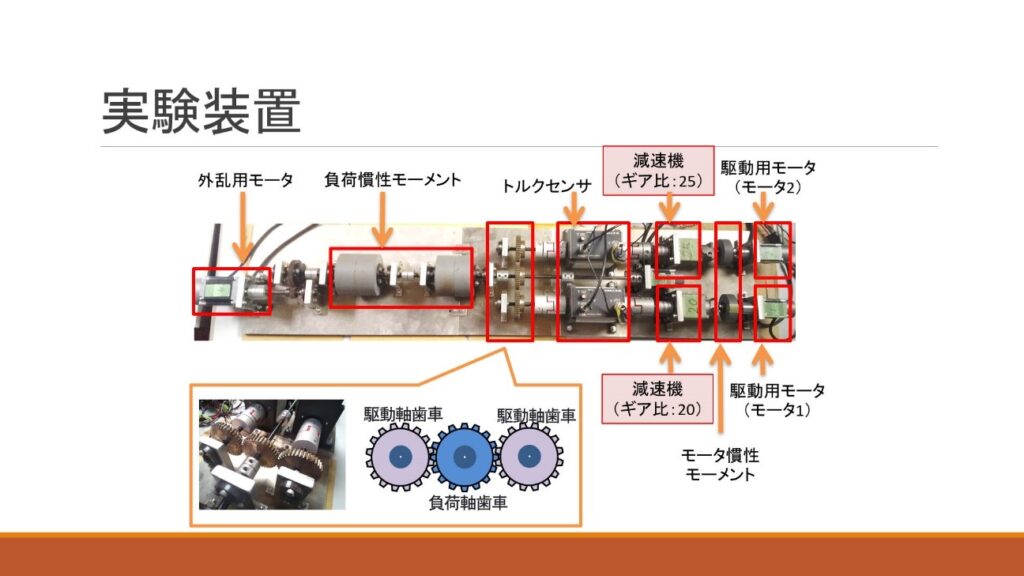
大きい負荷を持つアプリケーションでは、1つのモータでは回し切らないので、複数のモータを協調させて動作させます。また、工作機械の送り機構などでもタンデム制御が使用されています。
細長いものを動かす際に1つの軸に1つのボールねじで動かすとバランスが悪くなります。その場合、両端を保持するような構造にすると、中央だけで引っ張るよりスムーズに動作するので、そういったアプリケーションに利用できないかと考えています。
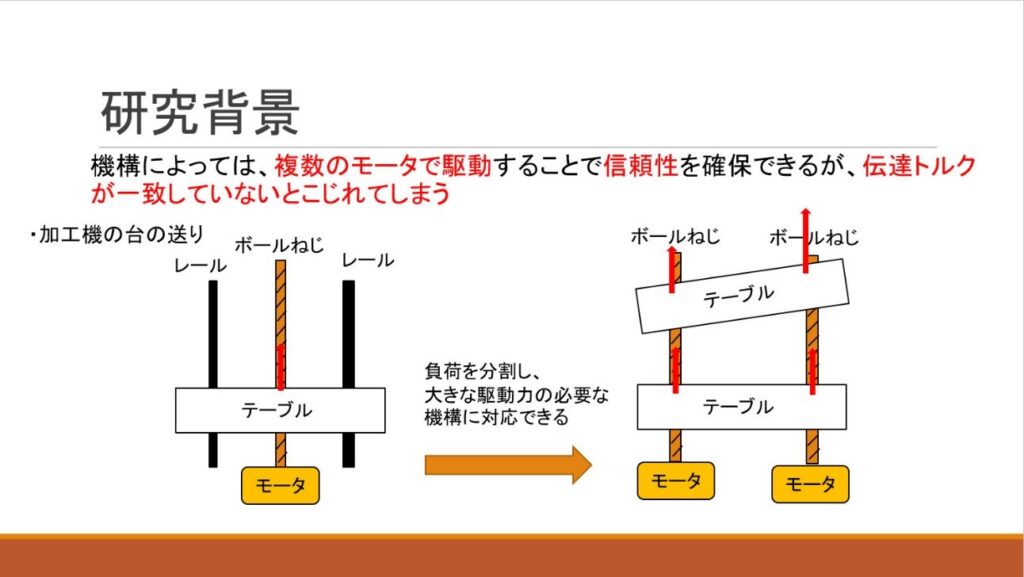
それぞれにモータやモータの軸を付けて動かす。長机を運ぶ際に両端を持って移動するのと同じようなイメージです。(中央だけで持つと抉るような動作が発生するため)
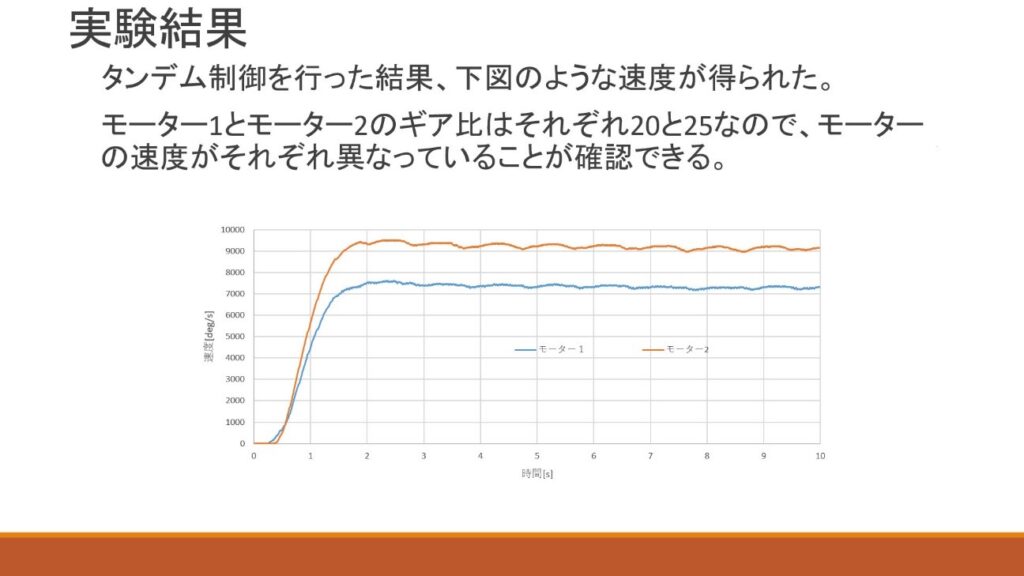
通常は同一のモータ、同一の減速比で動かすのが普通ですが、その減速比を変えたらどういうことが起こるかということを調べてみました。
[DSP] サーボアンプの方はあくまでモータの速度なりトルクを指令値として入力し、それを基にフィードバック制御を掛けるというところで、上位的な制御ロジックは弊社のコントローラという分担で動作していることでしょうか?
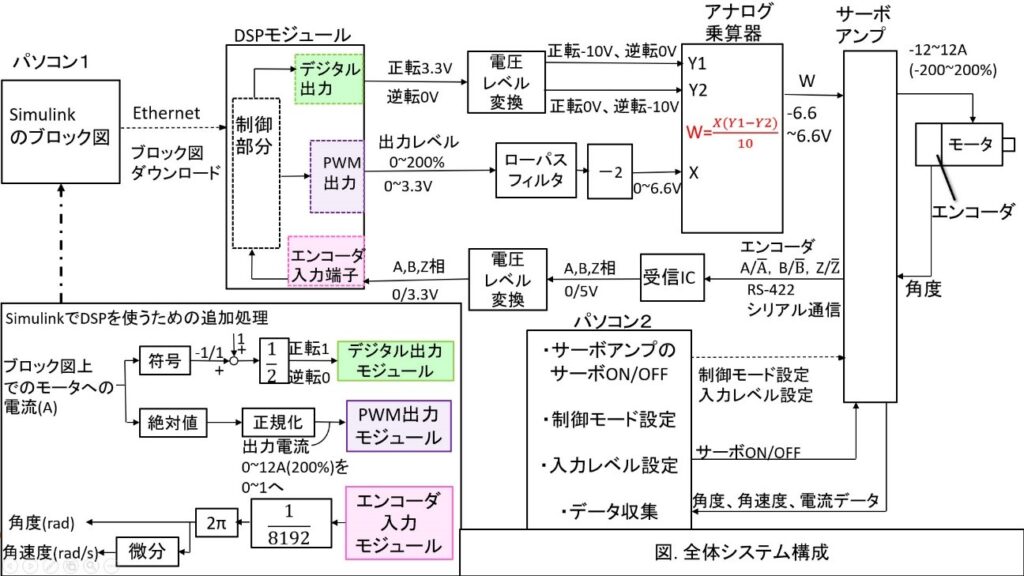
[前川先生] アンプに対しては単に電流目標値を出しているだけです。速度や変位のフィードバックはDT-0008RCP製品で行っています。使用しているモータのエンコーダは1回転で8192パルスが出力されるものを使用しています。それをカウンタモジュールから取得して不完全微分を行って角速度を求めています。
ラピッドコントロールプロトタイピング(RCP)のメリットについて
今回、弊社のDT-0008というコントローラを研究開発で使って頂いて、効率化の面では貢献できた部分はあるか?
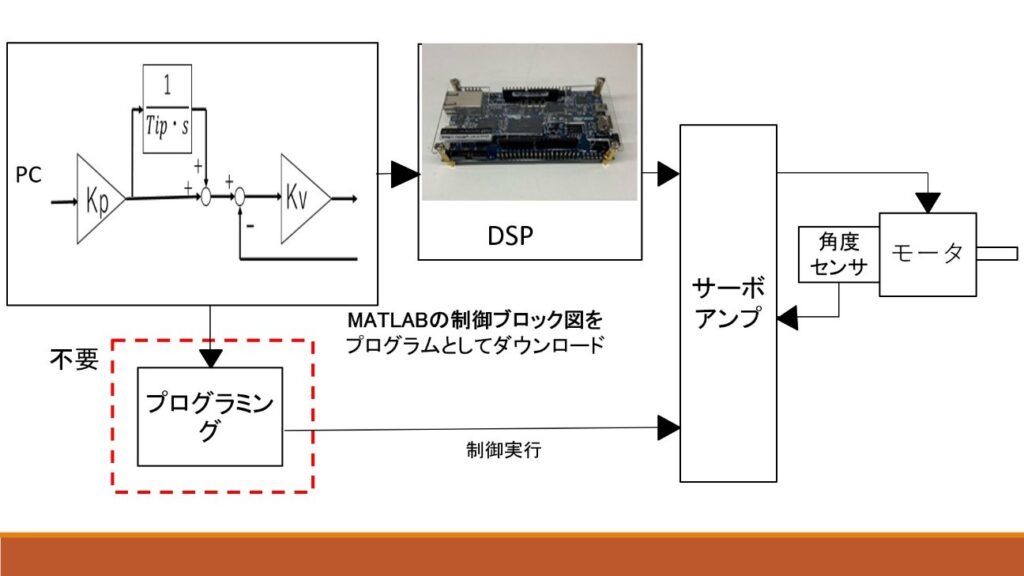
[前川先生] まず検討した制御方法がSimulink上で狙い通り動くかどうかをMILS上のシミュレーションで確認します。
効率化という意味では、その後、制御方法の部分をコピーし、モータからの角速度や角度フィードバック、シミュレーションでは[rad/s]や[rad]で取得している部分を、カウンタのパルスから取得するように修正します。電流出力箇所は、ソフト(DT-0008のCPU計算)でいくらの値を出したら何[A]になるかというスケーリングを行えば動くので、変更の必要がある箇所が限定され安心です。
[DSP] 忠実にSimulinkの制御と同じ処理が実行されていたいでしょうか?
[前川先生] はい。今まででしたら、Cソースのプログラミングや符号、変数を間違えたりすることがありましたが、疑うところが減るので非常に楽でした。
以前は、「このブロック図に対応するプログラムはこれ」というように資料を残して、学生が変わったらプログラムを一から読み直して確認するような作業も必要でした。
しかし、DT0008のRCPを使用する場合はSimulinkのブロック図と同じように動くので、ブロック図だけ確認しておけばそのまま使用できます。したがって、図面と実際のコードの合わせ込みの作業が無くなり、非常に楽になりました。
効率以外にスペック面で貢献できたところや、今後このスペックをこういうことに生かせるのではないかといった点はあるか?
[前川先生] 今のシステム(DT-0008アカデミック向けRCP)は0.5msの制御周期で回すことができています。以前のPCでやっていたときは、制御周期は5msでした。
また、今のコントローラ、DT-0008を繋いだままで、制御周期を5msまで落として動かすと、速度制御が不安定になりました。不安定になる要因としては、角度エンコーダのカウンタの値をSimulinkの中で不完全微分して速度を求めていることが影響していると思います。以前のPCのみの時の制御周期は5msでしたので、サーボアンプから入力した速度信号の方が位相遅れが少なかったかもしれません。DT-0008の制御周期を5msで走らせたときに、カウンタの値から角速度を不完全微分で求めるのは5ms周期ですが、サーボアンプ内部の角速度計算周期はもっと速く動作しているものと思われます。
DT-0008での5msと以前のPCのみの5msでは速度のフィードバックが異なる部分がありますが、DT-0008では0.5msの速い制御周期が実現できゲインを上げられるようになったことは確かです。
リアルタイムシミュレータの今後の研究での活用
DT-0008のコントローラを将来、どのように研究に活用できそうですか。
[前川先生] タンデム制御をもう少し進めるか、それに関連するノーバックラッシュ制御にも使用を考えています。
[DSP] ノーバックラッシュ制御とはどのような制御ですか?
[前川先生] 今のタンデム制御と駆動機構は全く同じです。モータの駆動方法に違いがあります。まず、1つの負荷を駆動するのに正転/逆転用としたそれぞれのモータに定格トルクの5%ほどの弱いトルク(オフセットトルク)を加えて、ガタ(バックラッシュ)の影響をなくした状態で負荷を保持します。次に、プラス側のモータの方だけトルクを上げるとマイナス側のモータは負荷側の歯車に歯を押し付けたまま回されます(ガタを発生させないように動かす)。回転方向を逆にする場合は、プラス側のモータのトルクを減らしてオフセットトルクだけにし、マイナス側のモータのトルクを上げるとガタを生じさせることなく回転方向を切り替えることができます。
タンデム制御は2つのモータにトルクを常に同方向に出力して回します。ノーバックラッシュ制御はプラス方向のモータとマイナス方向のモータそれぞれを逆方向に弱いトルク(オフセットトルク)で加えた状態で、プラス方向に回すときはプラス方向のモータのトルクのみを増やすといった動作になります。反対側のモータは負荷となるのでパワー面では落ちますが、ガタを無くすことができます。
名城大学 前川先生、インタビューにご協力いただきありがとうございました。